Sound Locator M33
A real-time sound source localization system using embedded microcontroller and triangular microphone array on a Raspberry Pi Pico 2.
Grade: 8.4
Sound Locator M33
This project represents an ambitious attempt to create a real-time sound source localization system using an embedded platform. The objective was to accurately detect and locate a stationary sound source on a two-dimensional plane using multiple microphones and advanced signal processing techniques. This project was developed in collaboration with James Schutte and Julian Bruin as part of the 5LIU0: Premaster Linear Systems course at Eindhoven University of Technology.
Content
The system demonstrates core functionality for sound source localization, though with some components implemented as post-processing solutions due to time constraints.
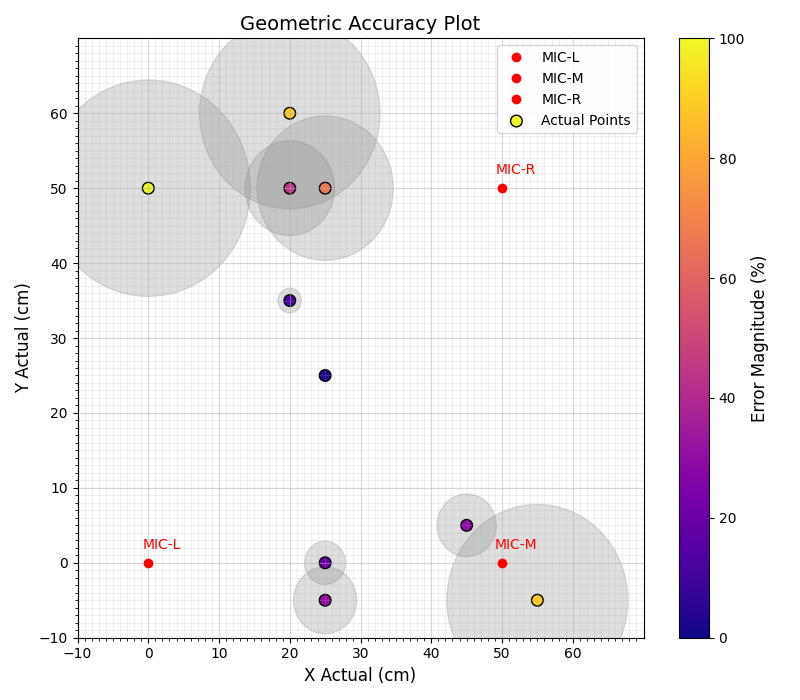 Figure: Localization accuracy results showing better precision within the triangular sensor array
Figure: Localization accuracy results showing better precision within the triangular sensor array
System Abstract
This project aimed to create a real-time sound localization system to address the challenge of accurately determining the position of acoustic sources in 2D space. The system uses a triangular microphone array with time difference of arrival (TDoA) algorithms and embedded signal processing.
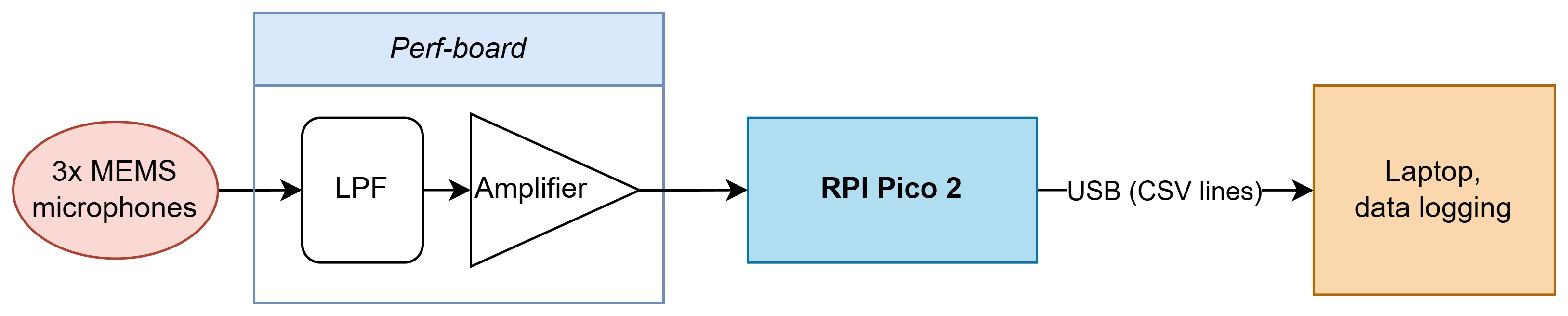 System block diagram showing the complete signal processing pipeline
System block diagram showing the complete signal processing pipeline
Features
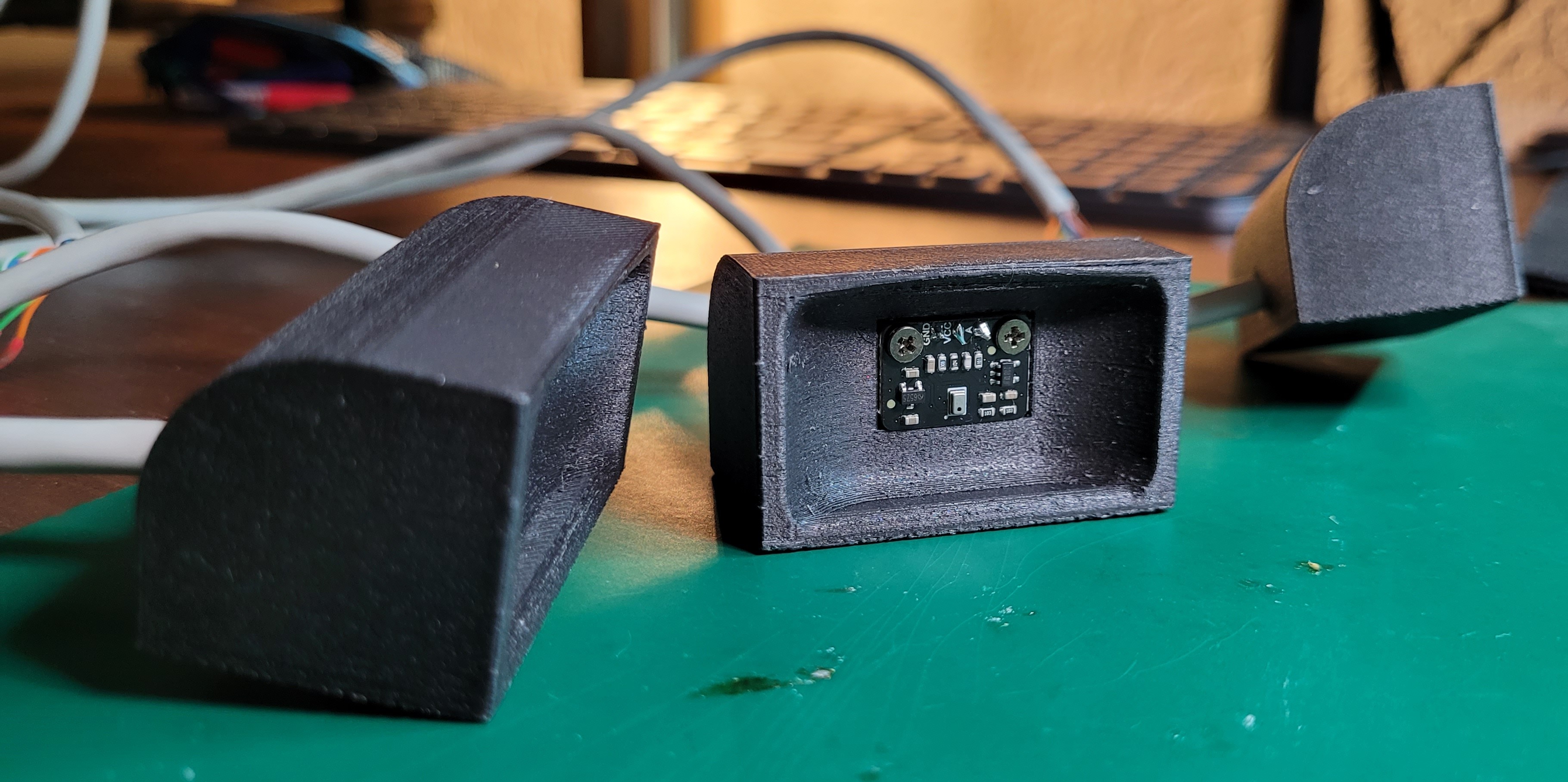
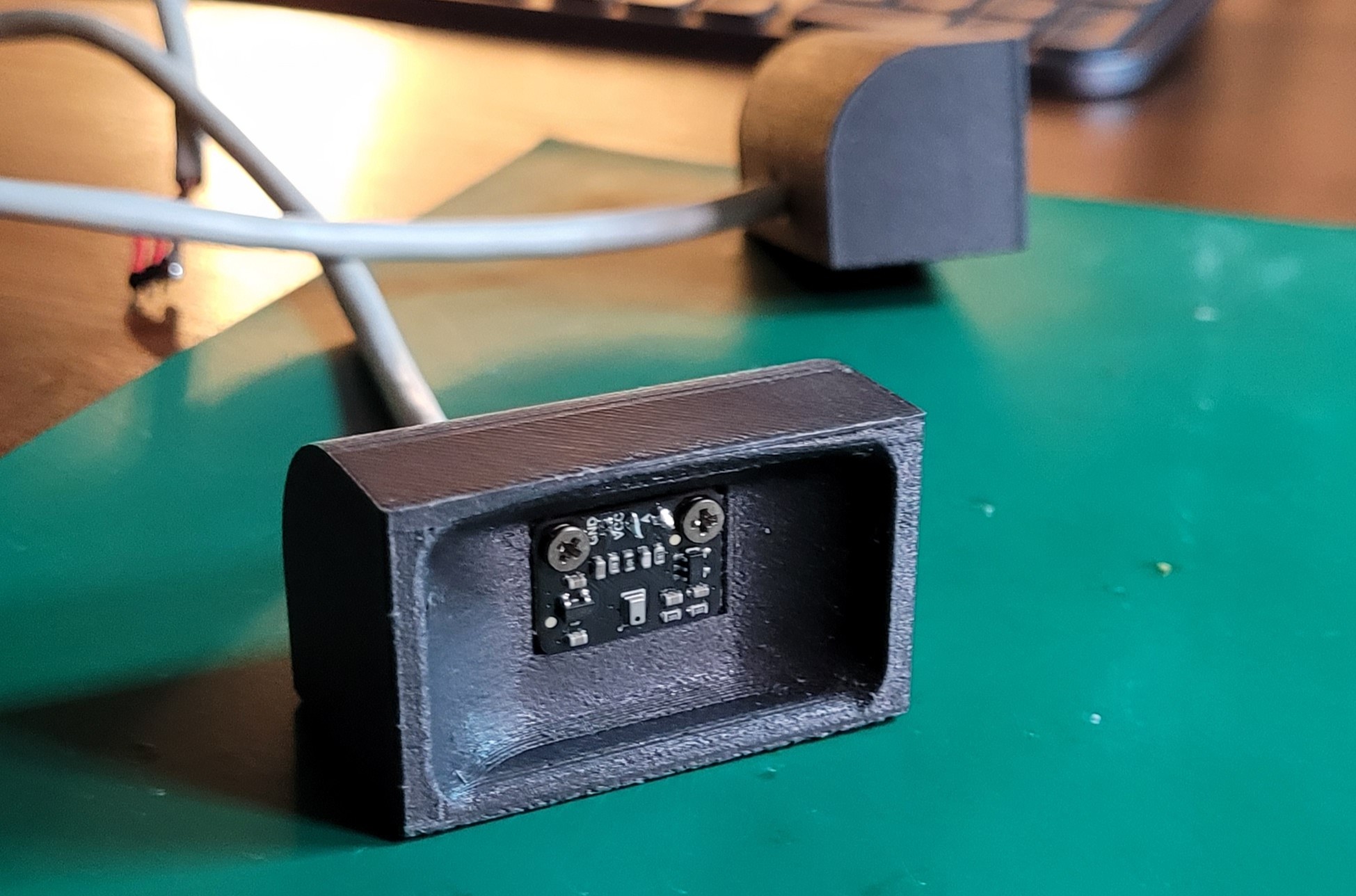
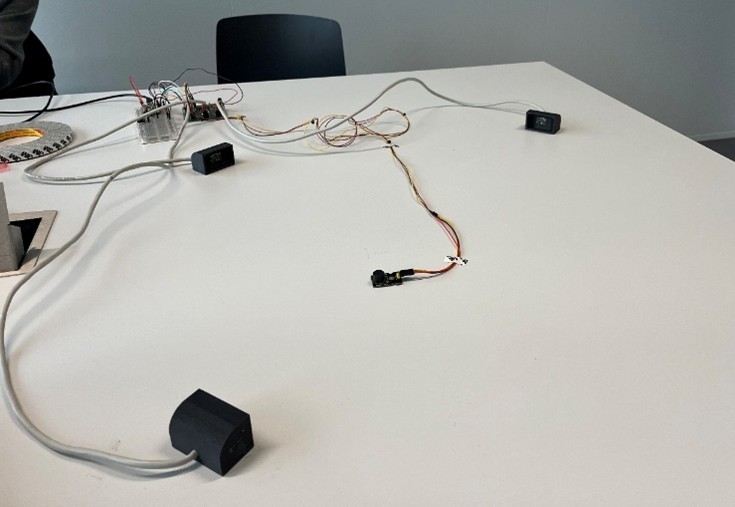
- Triangular Microphone Array: Three omnidirectional MEMS microphones positioned 50cm apart for optimal spatial resolution
- Real-time Sampling: 166.67 kHz effective sampling rate per microphone using DMA-based batch processing
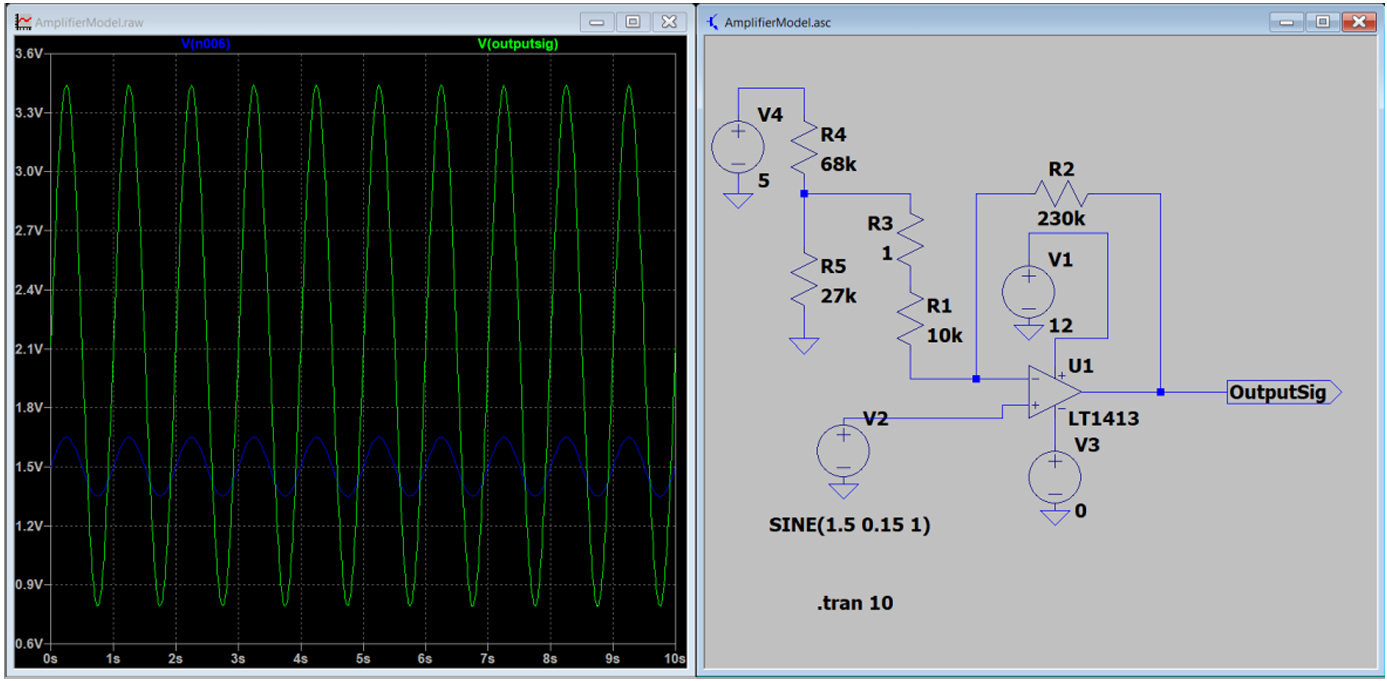
- Signal Amplification: Custom non-inverting operational amplifier with 8 kHz low-pass anti-aliasing filter
- Advanced Signal Processing: Cross-correlation based time difference of arrival determination
- Embedded Localization: Newton-Raphson method for real-time 2D position estimation
- Frequency Detection: FFT-based target signal validation using CMSIS-DSP library
- FreeRTOS Integration: Real-time operating system for concurrent signal processing tasks
- Precision Targeting: Theoretical millimeter-level accuracy with 2.06mm distance resolution
Technologies Used
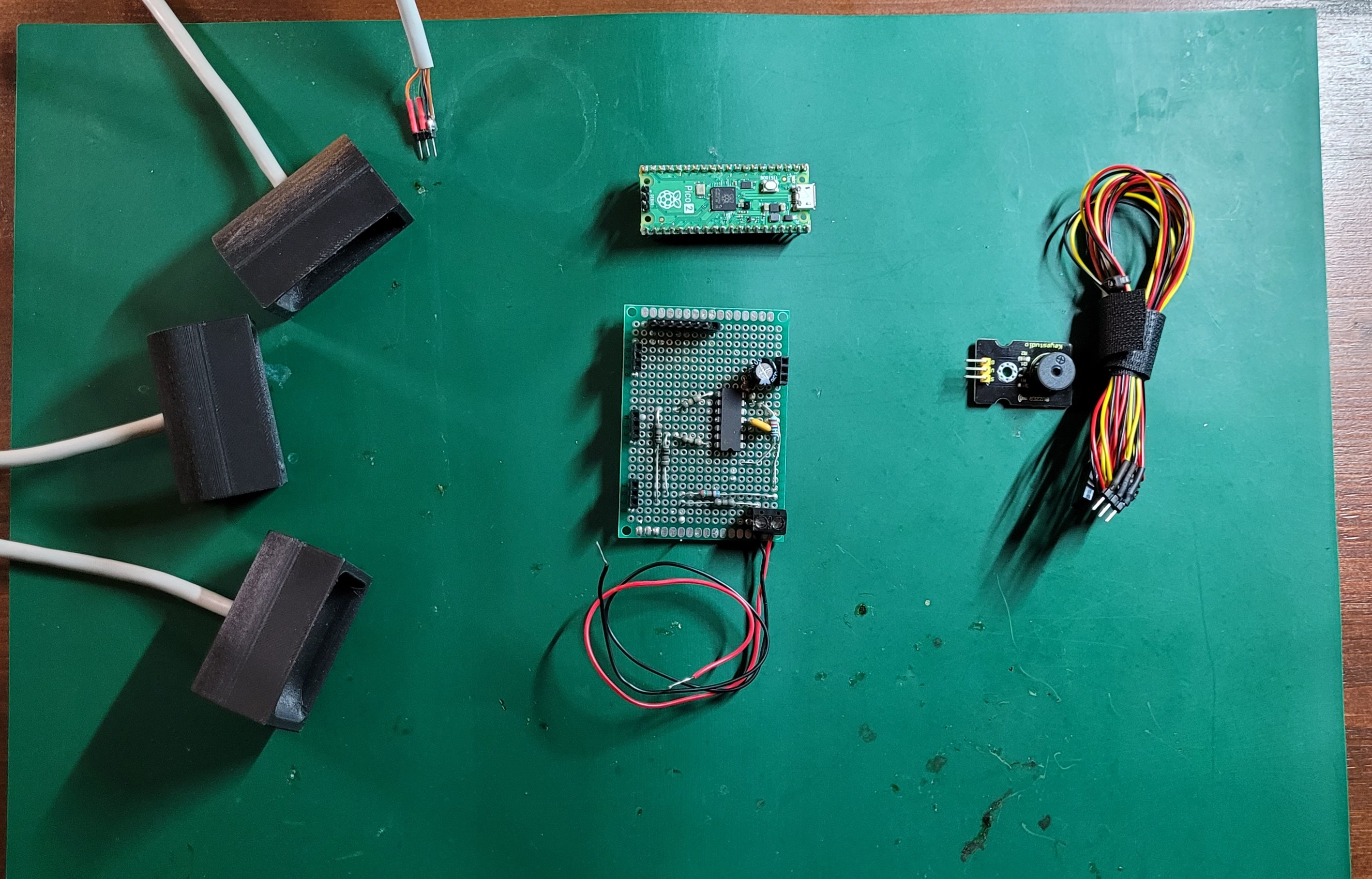
- Hardware: Raspberry Pi Pico 2 (RP2350 Cortex-M33) with Floating-Point Unit
- Programming Languages: C++ Standard 17 with embedded signal processing libraries
- Real-time OS: FreeRTOS for concurrent task management
- Signal Processing: CMSIS-DSP and Eigen3 libraries for mathematical operations
- Simulation Tools: MATLAB for algorithm validation and LTspice for circuit design
- Analysis Tools: Python with signal processing libraries for post-processing validation
- Development Environment: CMake build system with GitHub version control
- Debugging: J-Link Edu with VSCode integration for real-time debugging
Implementation Details
The system architecture consists of several key components working together:
Hardware Signal Processing:
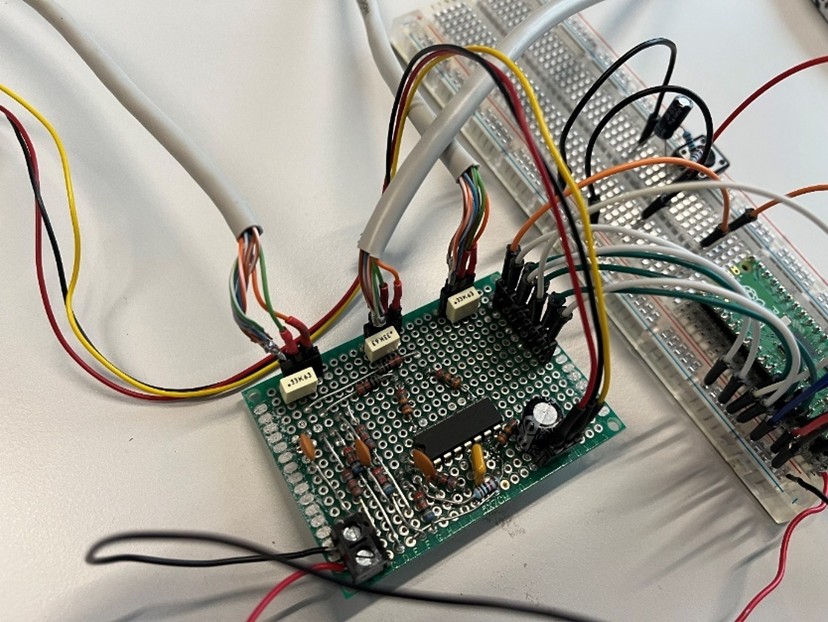
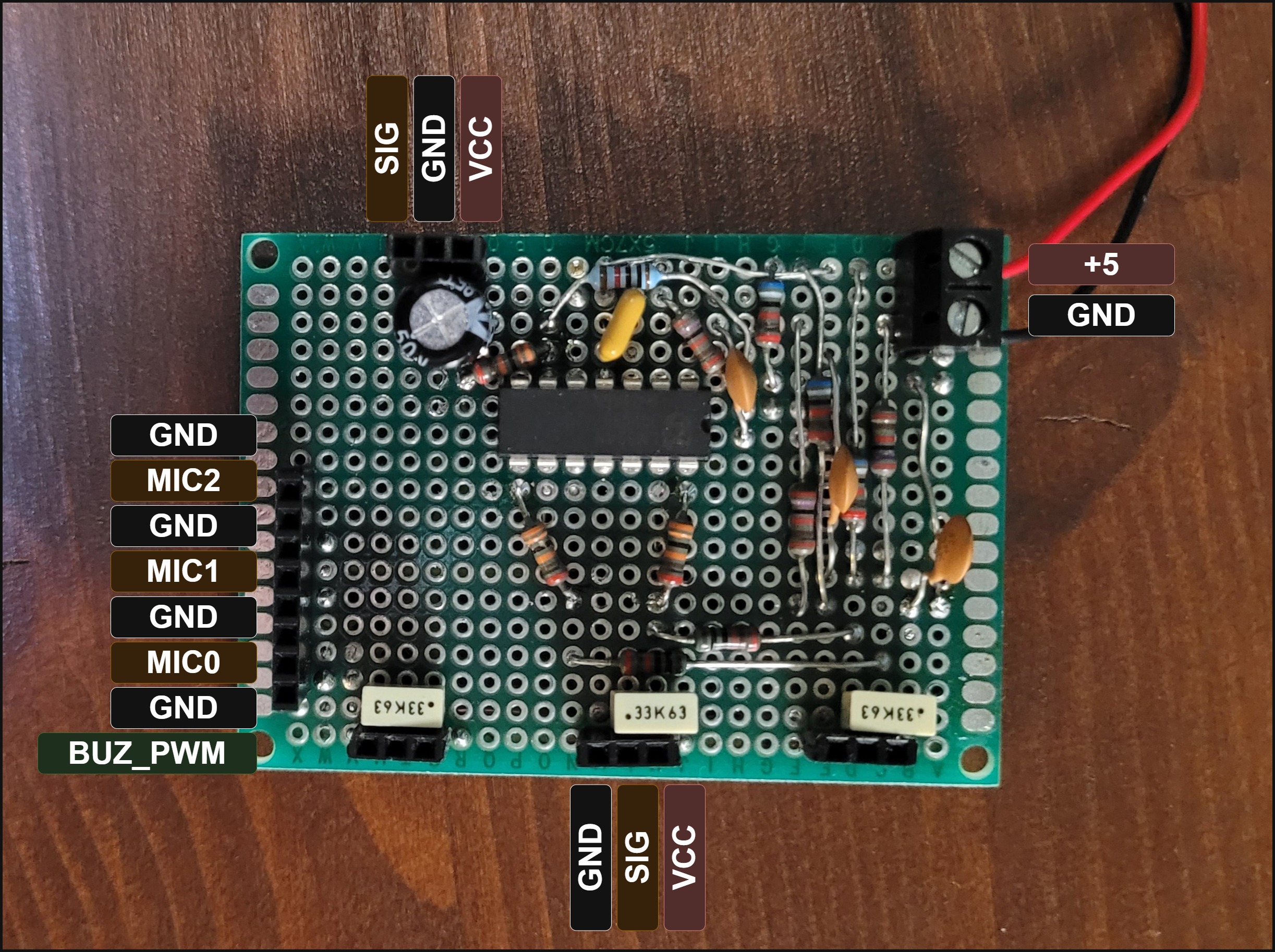
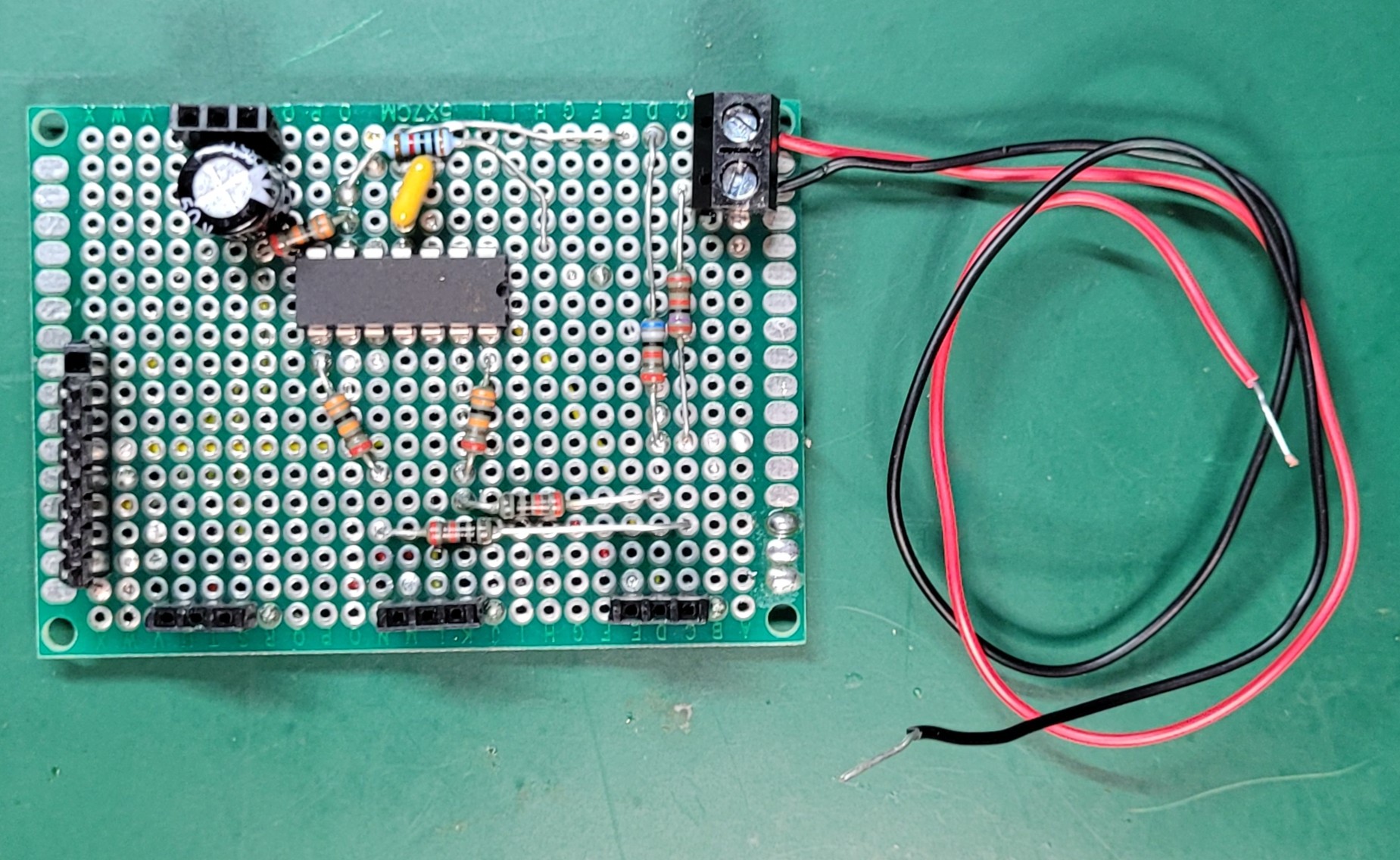
- Custom PCB design with non-inverting amplifiers providing optimized gain
- 8 kHz low-pass filters serving as anti-aliasing protection
- Variable amplifier stages with stable reference voltage signals
Embedded Software:
- DMA-based ADC sampling for maximum throughput (500 kHz total, 166.67 kHz per channel)
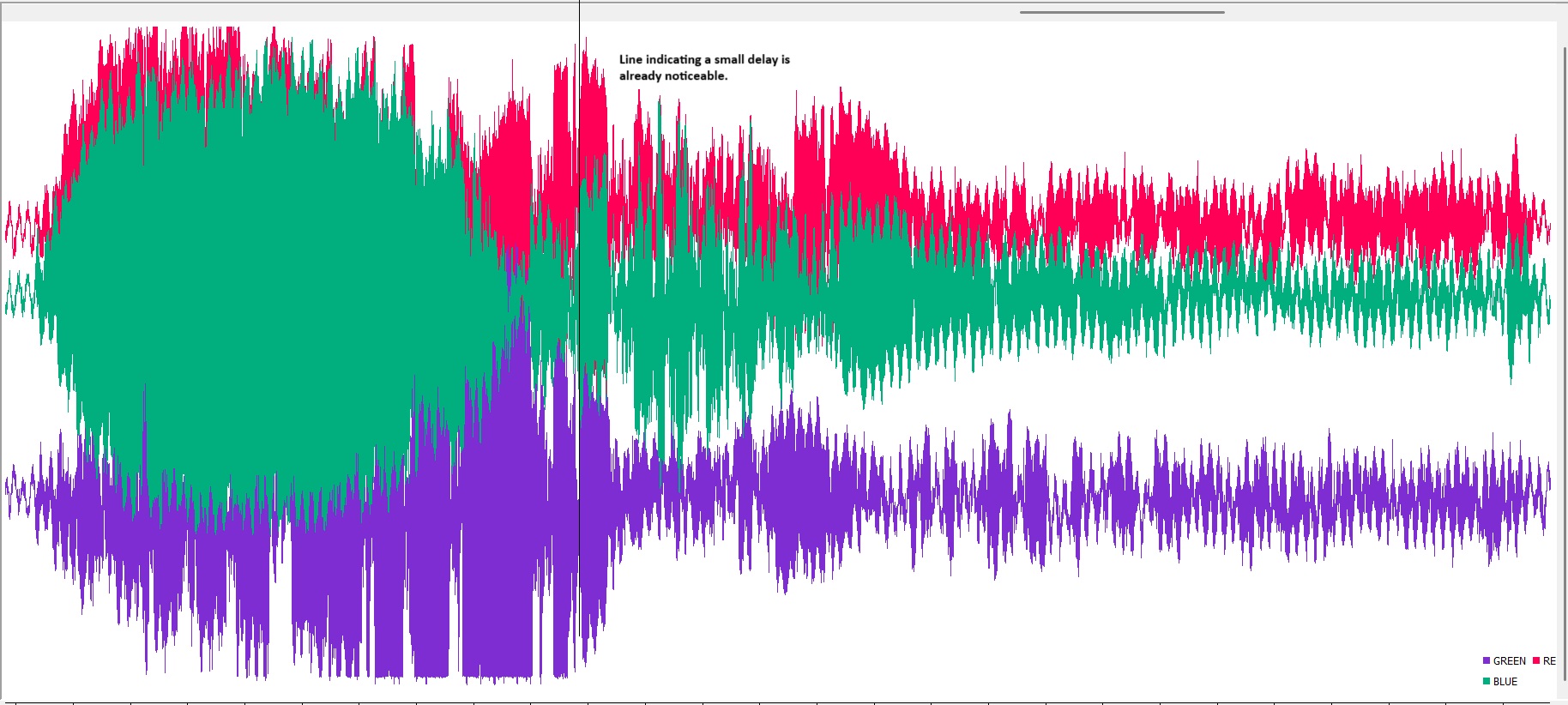
- Cross-correlation algorithms for time difference determination
- Newton-Raphson iterative solver for 2D position estimation
- FFT-based frequency detection for target signal validation
Technical Challenges Solved:
- Signal sensitivity optimization through calculated amplifier gain
- Noise reduction through digital filtering and frequency domain analysis
- Real-time processing constraints addressed with optimized algorithms
- Electromagnetic interference mitigation through proper PCB design considerations
Performance Results
The system achieved mixed results during evaluation:
Precision Metrics:
- Average X-coordinate error: 5.18 cm
- Average Y-coordinate error: 4.34 cm
- Success rate: 50% of measurements within 5.0 cm accuracy target
Key Findings:
- Best accuracy achieved when sound source is positioned within the triangular sensor array
- Performance degrades significantly for sources outside the sensor triangle
- Lower frequency signals (250 Hz) provide more reliable results than higher frequencies (4 kHz)
- Cross-correlation method sensitive to signal period relative to sensor spacing
System Limitations:
- Maximum effective distance limited by frequency: d = 1/(f × 340.29 × 100)
- Sensor casing may obstruct audio from certain angles
- Batch processing introduces timing artifacts affecting analysis
Future Improvements
Several enhancements have been identified for system optimization:
Hardware Enhancements:
- CAD-based PCB design with improved ground plane and signal integrity
- Active bandpass filtering instead of simple low-pass filtering
- Optimized sensor housing to reduce directional sensitivity
Software Optimizations:
- Complete integration of TDoA algorithms on embedded platform
- Real-time performance optimization for sub-5-second inference
- Enhanced noise filtering and signal validation algorithms
System Integration:
- Unified real-time processing pipeline eliminating post-processing dependencies
- Improved calibration procedures for sensor array geometry
- Advanced correlation techniques like GCC-PHAT for enhanced accuracy
Lessons Learned
This project provided valuable insights into embedded signal processing:
- Peak-based time difference methods proved unreliable for consistent localization
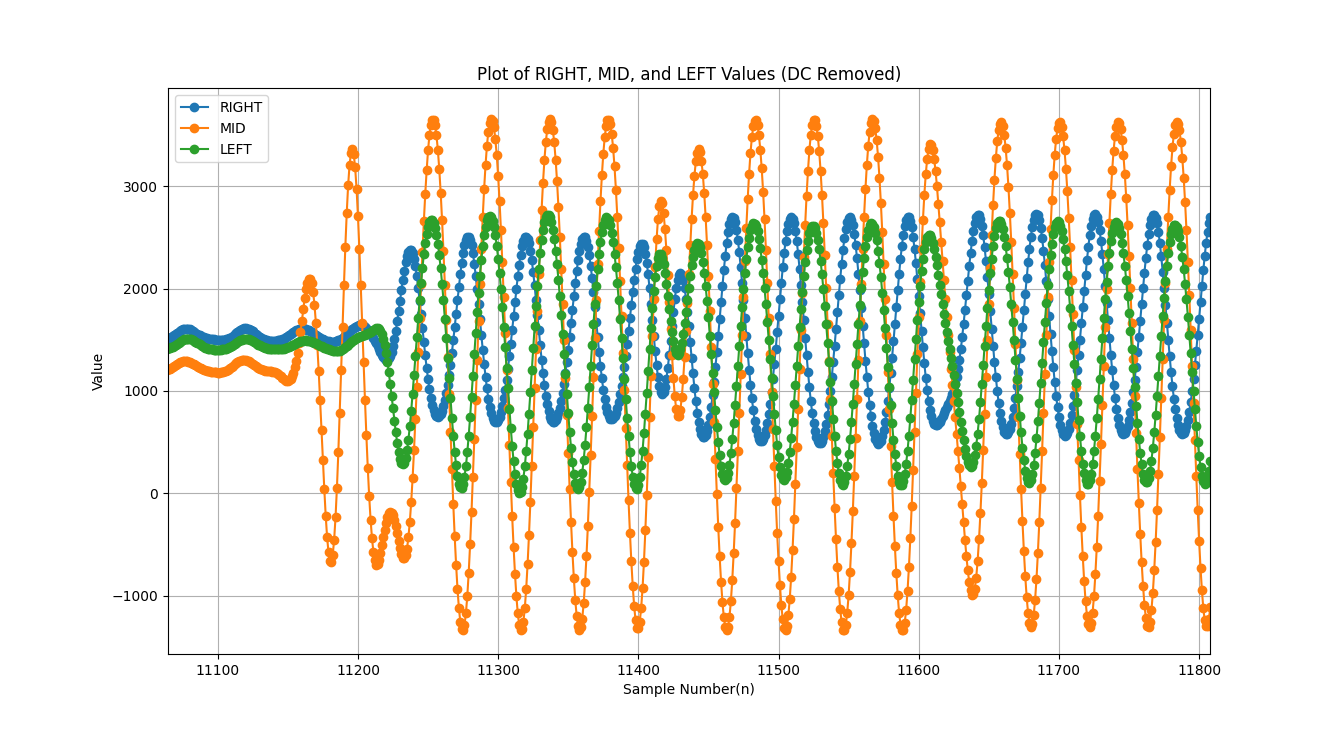
- Square wave signal sources (buzzers) create processing artifacts; sinusoidal sources preferred
- Batch sampling introduces timing challenges that must be carefully managed
- Cross-correlation requires careful consideration of signal period relative to sensor spacing
- Real-time embedded constraints demand algorithmic optimization and approximation techniques
The Sound Locator M33 project demonstrates the complexity and challenges inherent in real-time embedded signal processing while providing a solid foundation for future development in acoustic localization systems.
This project was completed as part of the Linear Systems - Project (5LIU0) course at Technical University of Eindhoven (TUe), Embedded Systems pre-master program, 2024-2025.